

























































Default Category
توصیف
جزییات
فلایت کنترل APM یا همان آردوپایلوت یک سیستم ناوبری اتوماتیک کاملا Open Source و پرفروش ترین تکنولوژیی پایدار ساز رباتیکی است که حتی برنده جایزه مسابقه Outback 2012 در رقابت میان پهبادها شده است. آردوپایلوت از یک بخش سخت افزاری ماژولار با قابلیت اتصال صدها ماژول کاربردی و یک سامانه نرم افزاری قدرتمند تشکیل شده است . این برد دارای اسامی مختلفی از جمله آردوکوپتر، آردوپلن و آردو رور (Ardurover) هست که همگی بر کاربرد این برد مبتنی بر آردوینو جهت کنترل ربات های پرنده ، پهپادها و ربات های زمینی دلالت دارد. این دستگاه همه کاره قابلیتهای منحصر به فردی در کنترل هوشمند قایق، ماشین ، زیر دریایی ، هواپیما ، هلی کوپتر و مولتی روتورها و هر آنچه که توسط رادیو کنترل هدایت می شود را در اختیار کاربر قرار می دهد.
با استفاده از APM و سامانه هوشمند میشن پلنر شما می توانید به ربات خود ماموریت بدهید و ربات شما به صورت آتونوموس ماموریت خود را اجرا خواهد نمود ، کافی است نقاط GPS را روی نقشه تعین کنید و بعد همه چیز را به آردوپایلوت و سیستم هوشمند آن بسپارید. دستگاه رادیو کنترل خود را زمین بگذارید و پرواز و یا حرکت ربات خود را تا رسیدن به مقصد و سپس برگشت به خانه دنبال کنید!
ایستگاه زمینی می تواند لپ تاپ، گوشی هوشمند با سیستم عامل اندروید و یا آی پد باشد و با استفاده از ماژول تلمتری (سیستم کنترل اطلاعات بی سیم از راه دور ) و ماژول OSD شما در هر لحظه می توانید همه چیز را کنترل کرده و اطلاعات سنسور ها و موقعیت ربات خود را مشاهده نمایید.

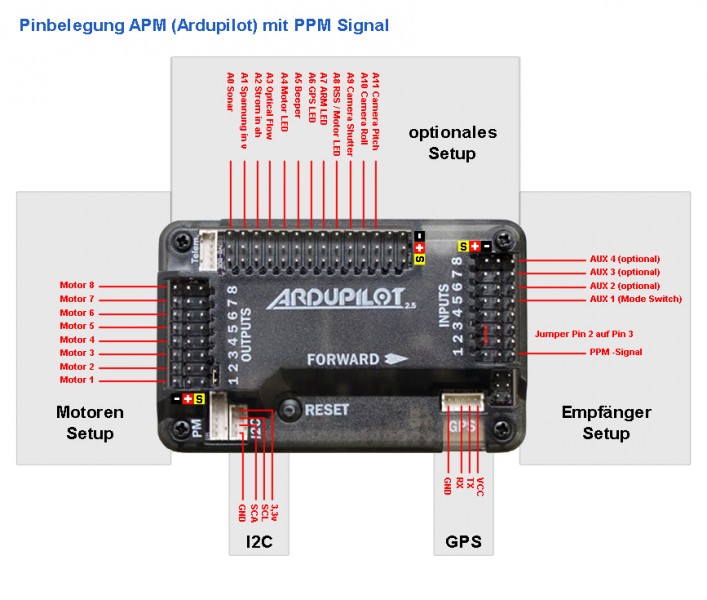
در وسایل رباتیک ( به ویژه مولتی کوپترها و مریخ نوردها) قطب نما باید تا حد امکان دور از منبع تغذیه و موتورها قرار داده شود. این نسخه از برد APM بر خلاف نسخه های قدیمیتر مانند ورژن ۲٫۵ به گونه ای طراحی شده است که فاقد قطب نما و GPS بر روی برد اصلی است و از یک سیستم GPS و کامپس خارجی و اکسترنال بهره میبرد تا شما بتوانید در هر کجای بدنه فریم خود آنرا به سادگی نصب نمایید.
APM آتوپایلوت همه کاره
APM به عنوان بهترین آتوپایلوت Open Source جهان مطرح می شود چون مقرون به صرفه ، قابل اعتماد و بطور باورنکردنی قابل انعطاف می باشد. APM نخستین آتوپایلوت همه کاره و در عین حال یک آتوپایلوت پهباد (UAV) کامل است، یعنی با همان سخت افزار می تواند کنترل کاملا مستقل بسیاری از وسایل ماشینی، از قبیل مولتی کوپتر و هلیکوپترهای سنتی تا هواپیماهای دارای بال ثابت و حتی Ground rover را برعهده گیرد و برخلاف کنترلرهای RC ساده ، APM می تواند هم از پرواز بصورت ناوبری دستی و هم اتوماتیک پشتیبانی کند که شامل دریافت صدها نقطه GPS ، کنترل دوربینی ، پرواز و فرود اتوماتیک می شود.
کاربردها
APM برای کاربرانی که نیاز به عملکرد بالا در سیستم کنترلی روی هواپیمای با بال ثابت، مولتی روترها و ماشین های زمینی دارند مورد استفاده قرار می گیرد. بردهای های APM در شمار زیادی از زمینه های مختلف از قبیل کشاورزی دقیق و مدرن، معدن کاوی و جستجو ونجات تا نگهداری و نگهبانی از حیوانات، سرگرمی و تحقیقات علمی بکار می رود. هنگامی که شما نیاز به ریموت دارید و با مشکل دسترسی رادیویی مواجه اید APM با بهره بالا و استفاده از اطلاعات مبتنی بر دیتا برای مدیریت کامل کنترل یک وسیله بهترین انتخاب خواهد بود.
APM بهتر از کنترلرهای دیگر
انواع زیادی کنترلر پرواز در بازار وجود دارد. APM تنها کنترلری است که با داشتن ویژگی های بی نظیر و قابل اطمینان ، عملکرد و قیمت مناسب آن را از دیگر کنترلرها جدا می سازد و میان هزینه ای که برای آن می پردازید در قبال امکاناتی برای شما فراهم می کند تعادل قابل قبولی را ایجاد می کند. این برد ماژولار بوده و صدها ماژول جداگانه برای استفاده های خاص را میتوان به آن متصل کرد .

